
Guider un robot situé sur Terre depuis la Station spatiale internationale (ISS), en disposant d’une interface à retour de force très fiable, autrement dit un outil permettant de «ressentir» à distance les faits et gestes du robot: c’est l’exploit qu’a rendu possible Force Dimension, une petite PME suisse née d’une spin-off de l’EPFL.
Pourquoi c’est intéressant. Pouvoir recréer l’illusion du toucher peut être déterminant pour bien commander un robot à distance, qui plus est lorsque celui-ci explore une surface largement inconnue, comme ce sera le cas avec les futurs robots lunaires qui seront probablement commandés depuis un poste spatial habité en orbite autour de la Lune. Force Dimension a réalisé ce projet pour le compte de l’Agence spatiale européenne (ESA) en moins d’un an – une prouesse!
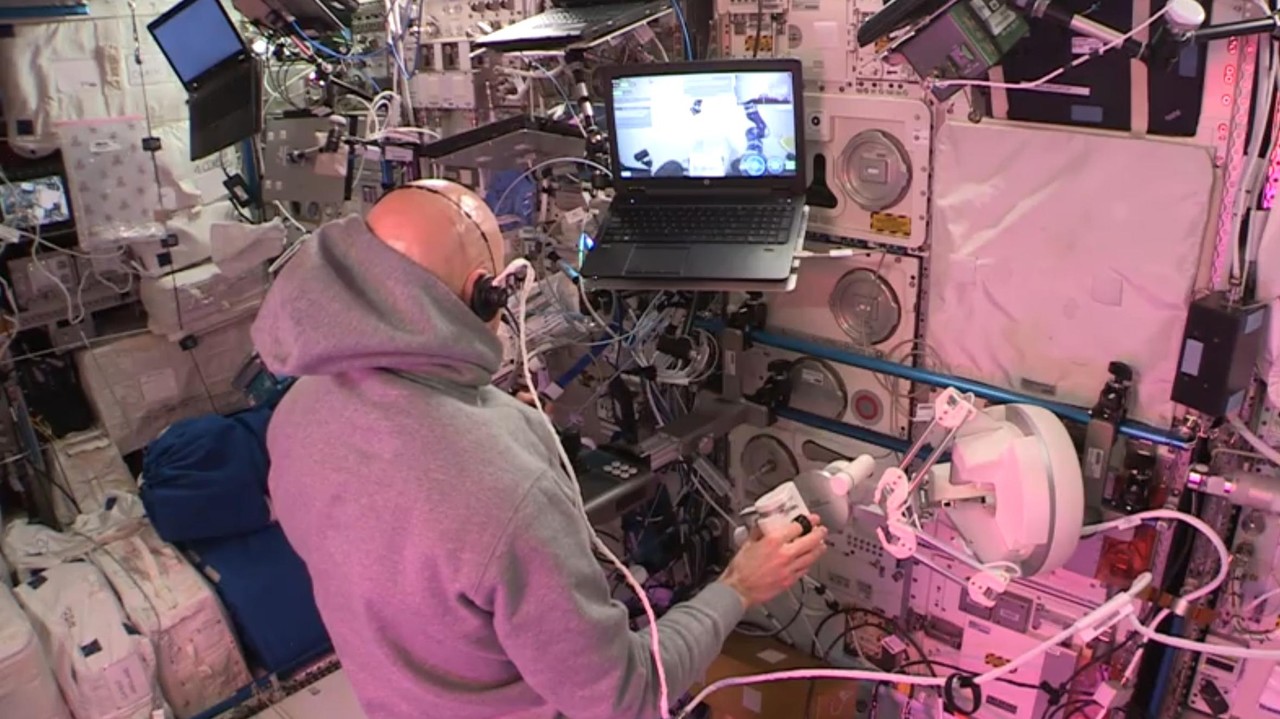
Le projet. Le 26 novembre dernier, depuis l’ISS située à 400 km de la Terre, l’astronaute italien Luca Parmitano a pu commander, à l’aide d’un joystick particulier capable de se mouvoir dans les trois dimensions, le robot Analog-1 situé, lui, au centre de recherches de l’ESA au Pays-Bas. Il pouvait non seulement faire bouger l’engin, mais aussi ressentir, de manière très réaliste dans l’interface haptique qu’il tenait en main, le retour de force, autrement dit une résistance forte lorsque le bras du robot touchait des surfaces dures, voire rugueuses, mais moindre lorsqu’il s’enfonçait dans le sable.

«Depuis l’ISS, le pilote voyait ce qu’il faisait à l’aide de caméras installées sur le bras robotisé d’Analog-1», explique Kjetil Wormnes, ingénieur à l’ESA et responsable du robot. Les informations visuelles et haptiques lui parvenaient toutefois avec un retard de 0.8 seconde, car, devant être relayées par des satellites géostationnaires pour permettre le contact en continu entre l’ISS et les Pays-Bas, elles parcouraient 80’000 km. Mais cette situation sera différente, et ce délai quasi-nul, lorsque des robots seront pilotés sur la surface de la Lune depuis un poste d’observation satellisé autour d’elle.
Les intérêts. François Conti, co-fondateur de Force Dimension :
«Jusque-là, les missions d’explorations de surface d’autres astres que la Terre étaient entièrement automatiques, avec la nécessité de programmer entièrement chaque action ou déplacement du robot. Avec notre interface, les effets d’une action ou d’un mouvement du robot peuvent être analysés immédiatement et être adaptés en fonction. Cela change complètement la manière de penser un robot.»
Pour les scientifiques, les intérêts sont donc multiples :
- Gain de temps. Programmer entièrement le comportement du robot n’est plus nécessaire. De plus, explique Jessica Grenouilleau, cheffe à l’ESA de ce projet baptisé METERON, «ne serait-ce qu’équiper un astronaute avec un scaphandre prend des heures… Avec de tels systèmes robotisés, bien davantage de tâches peuvent être effectuées en moins de temps.»
- Décisions prises en temps réel. des géologues, situés qui plus est encore ailleurs (au Centre des astronautes européens de Cologne), ont pu communiquer leurs consignes à Luca Parmitano en fonction de l’avancée de l’expérience; de quoi simuler une réelle exploration superficielle à distance d’une autre planète.
- Démonstration de l’utilité de l’interaction homme-machine pour de meilleurs résultats sur le terrain, alors que la tendance (trop généralisée) tendait à être que des robots dotés d’intelligence artificielle pourraient se débrouiller tout seuls.
Thomas Krueger, ingénieur en robotique de l’ESA, cité dans un communiqué :
«Pour ce scénario d’exploration impliquant un délai relativement court, nous avons pu combiner les avantages relatifs des humains et des robots: de l’homme pour son aptitude à traiter des problèmes complexes, réagir dans des environnements non structurés et prendre des décisions; et du robot, pour sa capacité à faire face aux environnements difficiles et à exécuter avec précision les commandes de son opérateur.
En améliorant l’expérience de l’opérateur avec le retour de force et les commandes intuitives, nous pouvons réaliser des tâches de commande robotiques jusqu’alors impossibles, et ouvrir de nouvelles méthodes d’exploration de l’espace.»
Ce qui est exceptionnel. Ce projet n’est pas parti de rien, l’interface haptique de Force Dimension, nommée sigma.7, existait déjà pour d’autres applications, médicales notamment. «Mais nous avons dû l’adapter pour les conditions de l’ISS, et nous y sommes parvenus en moins d’une année – une première pour l’ESA. Et tout a parfaitement fonctionné du premier coup. Les résultats scientifiques vont être publiés sous peu», dit François Conti, qui justifie ainsi aussi le peu de visibilité donnée au projet:
«Nous travaillions un peu en sous-marin car, jusqu’au dernier moment, nous avons dû faire de multiples tests de qualification pour le vol spatial. Autant d’étapes qui auraient pu conduire à l’arrêt du projet, et dont la communication aurait alors été en notre défaveur.»
L’origine du projet. L’interface haptique à la base de ce projet spatial a été imaginée il y a 34 ans déjà à l’EPFL par l’ingénieur Reymond Clavel. Elle a été depuis développée par la société Force Dimension, issue du groupe VRAI (pour Virtual Reality and Active Interfaces) du Laboratoire des systèmes robotiques. Elle peut notamment servir lors d’intervention chirurgicales.
Le bras du robot, lui, a d’abord servi à emballer divers produits (chocolats, biscuits, médicaments), explique l’EPFL dans un article. Les ingénieurs de Force Dimension, en collaboration avec des chercheurs de l’Université de Stanford, l’ont installé sur un robot humanoïde nommé Ocean One. Celui-ci a pour tâche, notamment d’aller explorer des structures très profondément immergées, en remplacement des plongeurs. En 2016, Ocean One a fait montre de ses exceptionnelles capacités en allant explorer une épave, permettant ainsi de révolutionner le monde de l’archéologie subaquatique.
L’entreprise. Discrète, Force Dimension, installée à Nyon, a été fondée en 2001, et développe d’abord une technologie haptique appliquée aux interventions chirurgicales, qui permet notamment de ressentir les textures et les formes des organes. Dès 2009, elle entre sur le marché du jeu vidéo. Elle est aussi active dans l’horlogerie. Depuis, la société a vendu plus de 1200 interfaces haptiques, donc le prix oscille entre quelques dizaines et plus d’une centaine de milliers de francs.
Le contexte mondial. Avec l’essor surtout des jeux vidéos et des besoins en chirurgies de pointe, les technologies haptiques, comme celle que développe Force Dimension, bénéficient d’un intérêt exceptionnel. Selon le Global Haptics Technology Market report, qui fait le point sur ce domaine en plein boom, le marché, qui était de 9,5 milliards de dollars en 2017, pourrait atteindre 42 milliards d’ici 2026. Les autres acteurs principaux du domaine incluent Texas Instruments et Johnson Electric Holdings notamment. Selon François Conti, l’Asie, avec surtout la Chine et la Corée du Sud, arrive également en force.
Les prochaines étapes. Les ingénieurs de Force Dimension vont poursuivre leur travail d’optimisation de leur interface haptique, et devraient mener l’an prochain une campagne en extérieur de tests de commande à distance sur une simulation de surface lunaire, mais avec un pilotage depuis la Terre cette fois. François Conti:
«Nos prochaines expériences menées dans l’espace, d’ici trois ans peut-être, pourraient constituer en la démonstration que ces robots à interface haptique sont utilisables pour assembler des éléments mécaniques (d’une future station lunaire?) ou pour effectuer des percements, l’interface retransmettant les vibrations ressenties; de quoi contrôler la force appliquée sur la perceuse, ou éviter de casser le matériel percé.»













{kind=link}